PIDU – PID regulátor
Symbol blokuPotřebná licence: STANDARD

Popis funkce
Blok PIDU je základní blok pro vytvoření úplného regulátoru PID (P, I, PI, PD, PID,
PI+S). V nejjednodušším případě může pracovat zcela samostatně a plnit
standardní funkci PID regulátoru se dvěma stupni volnosti v automatickém
() nebo manuálním
režimu ().
V automatickém režimu () realizuje blok PIDU řídicí zákon PID regulátoru se dvěma stupni volnosti ve tvaru
kde je Laplaceova transformace řídicí veličiny mv, je Laplaceova transformace požadované hodnoty sp, je Laplaceova transformace regulované veličiny pv, je Laplaceova transformace dopředné vazby dv a , , , , , jsou parametry regulátoru. Znaménko pravé strany závisí na parametru RACT. Rozsah řídicí veličiny mv (polohového výstupu regulátoru) je omezen parametry hilim, lolim. Parametr dz udává pásmo necitlivosti v integrační složce regulátoru. Navíc integrační složka může být vypnuta a zafixována na své aktuální hodnotě vstupem IH (). Pro správnou funkci regulátoru je nutné propojit výstup regulátoru mv se vstupem tv a správně nastavit časovou konstantu vysledovávání tt.
Doporučená výchozí hodnota pro PID regulátor je , pro PI regulátor pak . Tím bude zaručen bezrázový přechod při přepínání režimu regulátoru (manuální, automatický) a správná funkce regulátoru při saturaci výstupu mv (tzv. antiwindup). Úpravou parametru tt je v případě potřeby možné nastavit přesné chování v saturaci (tzv. odskakování od saturace vlivem šumu) a při přepínání více regulátorů (velikost skoku při přepnutí, pokud není nulová regulační odchylka).
Přídavné výstupy dmv, de a SAT poskytují po řadě rychlostní výstup regulátoru (diference mv), regulační odchylku a příznak saturace výstupu regulátoru mv.
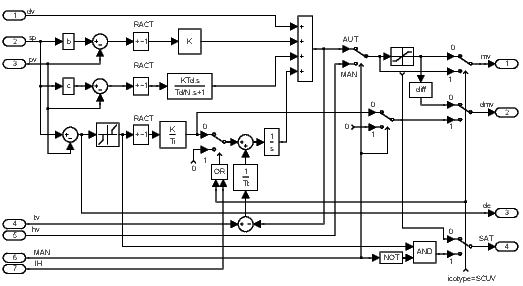
Jestliže je blok PIDU propojen s blokem SCUV (za účelem realizace krokového regulátoru bez polohové zpětné vazby), potom parametr icotype musí být nastaven na hodnotu 4 a význam výstupů mv, dmv a SAT je v tomto případě pozměněn: výstup mv je roven součtu P a D složky regulátoru, zatímco výstup dmv poskytuje diferenci jeho I složky a výstup SAT nese informaci pro blok SCUV, zda je regulační odchylka de v automatickém režimu menší než pásmo necitlivosti dz. Pro případ propojení bloků PIDU a SCUV se navíc doporučuje volit váhový koeficient požadované hodnoty pro derivační složku c rovný nule.
V manuálním režimu () je vstup hv kopírován na výstup mv, pokud nenaráží na horní či dolní omezení výstupu regulátoru. Celková regulační funkce bloku PIDU je zřejmá z následujícího obrázku.
Vstupy
dv | Proměnná dopředné vazby | Double (F64) |
sp | Požadovaná hodnota (setpoint) | Double (F64) |
pv | Řízená veličina | Double (F64) |
tv | Veličina pro vysledování | Double (F64) |
hv | Hodnota výstupu v manuálním režimu | Double (F64) |
MAN | Manuální nebo automatický režim | Bool |
|
|
|
IH | Zastavení integrace | Bool |
|
|
|
Výstupy
mv | Akční zásah regulátoru (manipulated variable) | Double (F64) |
dmv | Rychlostní výstup regulátoru (diference) | Double (F64) |
de | Regulační odchylka | Double (F64) |
SAT | Saturace | Bool |
|
|
|
Parametry
irtype | Typ regulátoru 6 | Long (I32) |
|
|
|
RACT | Převrácené působení výstupu regulátoru | Bool |
|
|
|
k | Zesílení regulátoru . Hodnota 0 (dle definice) vypne regulátor, záporné hodnoty nejsou dovoleny (k tomu slouží parametr RACT). 0.0 1.0 | Double (F64) |
ti | Integrační časová konstanta . Hodnota 0 znamená vypnutí integrační složky regulátoru (stejný efekt jako vypnutí parametrem irtype). 0.0 4.0 | Double (F64) |
td | Derivační časová konstanta . Hodnota 0 znamená vypnutí derivační složky regulátoru (stejný efekt jako vypnutí parametrem irtype). 0.0 1.0 | Double (F64) |
nd | Parametr filtru derivační složky. Hodnota 0 znamená vypnutí derivační složky regulátoru (stejný efekt jako vypnutí parametrem irtype). 0.0 10.0 | Double (F64) |
b | Váhový faktor pro proporcionální složku 0.0 2.0 1.0 | Double (F64) |
c | Váhový faktor pro derivační složku 0.0 2.0 | Double (F64) |
tt | Časová konstanta vysledování; hodnota 0 znamená implicitní hodnotu, což je pro regulátor s integrační složkou a vypnutí vysledování pro regulátor bez integrační složky. Pokud pro P nebo PD regulátor potřebujeme vysledování (tzv. regulace kolem rovnovážného bodu), zapneme vysledování nastavením kladné hodnoty (větší než perioda vzorkování). Vypnout vysledování pro regulátor s integrační složkou není možné (kvůli windup efektu). 0.0 1.0 | Double (F64) |
hilim | Horní mez akčního zásahu regulátoru 1.0 | Double (F64) |
lolim | Dolní mez akčního zásahu regulátoru -1.0 | Double (F64) |
dz | Pásmo necitlivosti | Double (F64) |
icotype | Typ výstupu regulátoru 1 | Long (I32) |
|
|
|
[Předchozí] [Na začátek] [Výše] [Další]
2022 © REX Controls s.r.o., www.rexygen.com