PSMPC - Pulse step predictive controller
PSMPC Demo
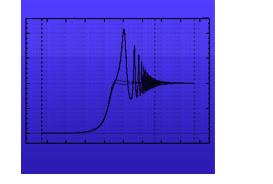
PSMPC simulator demonstrates the features of pulse step model predictive controller (MPC). The function block is designed for high quality control applications where the control actions are limited. Predictive control is applicable even for difficult to control processes with dominant dead-time of non-minimum phase. It is suitable for cases where the fast step response without overshot is required. PSMPC can substitute traditional PID controller in lower level predictive control systems. The block description is available in the reference manual.
How to start the simulator?
Before starting the simulator (applet) by START ![]() button, the sampling period can be set in the field Sampling time. The continous applet running can be stopped by STOP
button, the sampling period can be set in the field Sampling time. The continous applet running can be stopped by STOP ![]() button or paused by PAUSE
button or paused by PAUSE ![]() button. The simulation speed can be adjusted by the slider. The re-init button
button. The simulation speed can be adjusted by the slider. The re-init button ![]() reset all parameters to initial state.
reset all parameters to initial state.
All parameters of active blocks (non-shadow) can be changed in the dialog which is invoked by cliking at the block. Detailed description of block parameters is available in Function blocks reference manual.