PIDMA - PID controller with pulse autotuner
PIDMA Demo
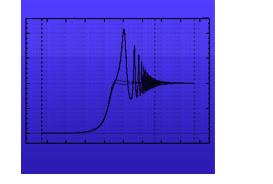
The simulator demonstrates the features of PIDMA function block - PID controller with pulse (moment) autotuner. The tuning algorithm is based on estimation of three impulse response moments. Firstly, both drift and noise of process variable are estimated. Then the rectangle pulse is applied. From the pulse experiment, the process model is build internally using three impulse response moments. Finally, the robust PID controller parameters are computed from the internal tables. The simulator demonstrates the PID loop tuning including noises. The detailed description of PIDMA block is available in the reference manual.
How to start the simulator?
Before starting the simulator by START ![]() button, the sampling period can be set in the field Sampling time. The continous applet running can be stopped by STOP
button, the sampling period can be set in the field Sampling time. The continous applet running can be stopped by STOP ![]() button or paused by PAUSE
button or paused by PAUSE ![]() button. The simulation speed can be adjusted by the slider. The re-init button
button. The simulation speed can be adjusted by the slider. The re-init button ![]() reset all parameters to initial state.
reset all parameters to initial state.
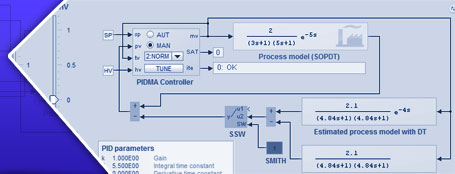
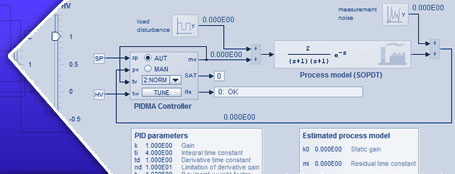
All parameters of active blocks (non-shadow) can be changed in the dialog which is invoked by cliking at the block. Detailed description of block parameters is available in Function blocks reference manual.